Visual Object Tracking(VOT)이란?
Visual Object Tracking(VOT)은 영상 혹은 연속된 이미지 프레임에서 목표 객체의 위치를 지속적으로 추적하는 기술입니다. 이는 자율 주행, 감시 시스템, 로봇 비전, 증강현실(AR) 등 다양한 분야에서 핵심 요소로 작용합니다. 객체 인식과 달리 VOT는 초기 프레임에서 대상 객체만 주어지고, 이후 프레임에서는 해당 객체를 계속 추적해야 하므로 더욱 높은 정밀도와 실시간 처리 능력이 요구됩니다.
최근 VOT 분야에서 눈에 띄는 진전 중 하나는 Siamese 네트워크(Siamese Network) 기반의 모델 적용입니다. 이 구조는 비교 기반 학습(Comparative Learning)에 강점을 가지며, 영상 내에서 객체 간 유사도를 효과적으로 측정할 수 있어 VOT에서 매우 유용하게 사용됩니다.
Siamese 네트워크 구조의 개요
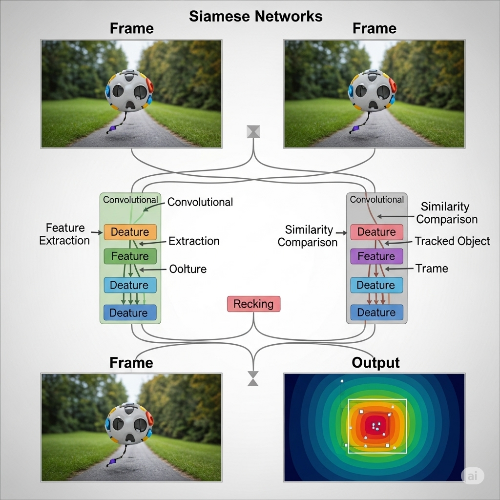
Siamese 네트워크는 두 개의 동일한 신경망 구조를 병렬로 배치하고, 각 입력에 대해 동일한 가중치로 특징을 추출하여 이들의 유사성을 비교하는 방식입니다. 입력된 두 이미지 쌍이 같은 객체인지를 판단하는 데 최적화되어 있으며, 일반적으로 다음과 같은 구조로 이루어져 있습니다:
- 입력 이미지 A와 B
- 동일한 구조와 가중치를 공유하는 피처 추출기
- Cosine similarity 또는 L1/L2 거리 계산
- 손실 함수: Contrastive loss 또는 Triplet loss
VOT 문제에 이 구조를 적용하면, 첫 프레임에서의 객체 템플릿과 새로운 프레임에서의 후보 객체 간 유사도를 계산함으로써 최종 추적 위치를 결정하게 됩니다.
VOT에 적용된 대표적인 Siamese 기반 모델
1. SiamFC (Fully Convolutional)
SiamFC는 VOT 분야에서 Siamese 네트워크를 적용한 대표적인 초기 모델입니다. 객체 추적을 위한 간단하면서도 강력한 프레임워크를 제공하며, 템플릿 이미지와 검색 이미지 사이의 유사도를 전방향 합성곱(fully convolutional)으로 계산합니다.
- 템플릿과 검색 이미지가 각각 동일한 CNN을 거친 후, 두 특징 맵 간의 cross-correlation을 계산해 추적 위치를 예측합니다.
- GPU에서 실시간 처리 가능하며, 엔드-투-엔드 학습이 가능합니다.
2. SiamRPN (Region Proposal Network)
SiamRPN은 객체 탐지를 위한 RPN(Region Proposal Network)을 통합해, 추적 정확도를 높이고 BBox(경계 상자)를 더 정확하게 조정할 수 있습니다. SiamFC의 한계를 극복하기 위해 도입된 구조입니다.
- 두 입력 이미지를 각각 feature map으로 변환하고, 이를 조합하여 RPN을 통해 후보 영역을 생성합니다.
- 추적 대상의 크기 변화, 위치 이동, 변형 등에 강인한 특징을 보입니다.
3. SiamMask
SiamMask는 추적과 동시에 객체의 세분화 마스크(Segmentation Mask) 를 예측합니다. 단순한 BBox를 넘어 픽셀 수준에서의 정확한 추적이 필요한 경우에 적합합니다.
- VOT뿐만 아니라 비디오 인스턴스 세분화(Video Instance Segmentation)에도 활용됩니다.
- 객체의 불규칙한 경계 추적에 강점이 있으며, 다양한 응용 분야에 적용됩니다.
실제 적용 사례 및 성과
자율 주행 차량
Siamese 기반 VOT는 자율 주행 차량의 전방 카메라 영상에서 보행자나 차량을 추적하는 데 활용됩니다. 특히 빠른 이동과 장애물, 조명 변화 등 어려운 조건에서도 강건한 성능을 보이는 SiamRPN++ 모델이 적용된 사례가 많습니다.
스포츠 분석
스포츠 경기 영상에서 선수 또는 공의 위치를 추적하여 전술 분석, 선수 평가에 활용됩니다. 여러 선수들이 비슷한 유니폼을 착용하고 있음에도 불구하고 Siamese 구조는 개별 특징에 따라 객체를 안정적으로 구분할 수 있습니다.
감시 및 보안 시스템
감시 카메라 영상에서 특정 인물 또는 물체를 장시간 추적해야 하는 경우에도 SiamFC 또는 SiamMask 기반 시스템이 사용됩니다. 기존의 단순 추적 알고리즘보다 훨씬 정교하고, 신뢰도 높은 결과를 제공합니다.
Siamese 네트워크 기반 VOT의 장점과 한계
장점
- 유사도 기반 비교: 탐색 공간이 넓어도 정확한 추적 가능
- 모델 경량화: 엔드-투-엔드 학습으로 실시간 추적 가능
- 다양한 확장성: 탐지, 세분화 등과 쉽게 결합 가능
한계
- 템플릿 고정 문제: 초기 프레임의 객체 정보만을 유지하므로 객체의 변화에 적응력 부족
- 배경 오차 발생: 배경이 유사한 경우 객체 혼동 가능
- 추적 누적 오류: 프레임 간 추적 오류가 누적될 수 있음
최근에는 이를 해결하기 위한 Meta-Tracking이나 Online Template Update 방식의 연구도 활발하게 진행 중입니다.
향후 발전 방향
Siamese 네트워크 기반 VOT는 향후 다음과 같은 방향으로 발전이 기대됩니다:
- Transformer 기반 통합: Self-Attention 구조와의 결합을 통한 장기 추적 능력 강화
- Online Learning: 추적 대상이 변화해도 적응 가능한 실시간 학습 구조 적용
- Multi-object Tracking 확장: 다수 객체를 동시 추적하는 구조로 확장
- 경량화 최적화: 모바일 및 임베디드 환경에서도 실시간 추적 가능하도록 경량화
결론
Siamese 네트워크는 Visual Object Tracking의 판도를 바꿔놓은 중요한 기술입니다. 비교 기반의 구조는 다양한 영상 환경에서도 높은 정확도와 실시간 성능을 동시에 만족시키며, 향후 자율 주행, 스마트 시티, 증강현실 등 AI 기반 시각 기술 전반에 걸쳐 지속적인 활용이 기대됩니다.
'컴퓨터 비전 & AI > 객체 인식과 추적' 카테고리의 다른 글
| Thermal Object Detection: 야간 감시와 보안 솔루션 (0) | 2025.07.03 |
|---|---|
| Long-term Tracking: 사람과 차량의 장기 추적 시스템 설계 (1) | 2025.07.03 |
| Event Camera를 이용한 고속 움직임 객체 인식 연구 (1) | 2025.07.02 |
| Human‑Object Interaction Detection: 영상 속 행동 이해 (4) | 2025.07.01 |
| Pose Estimation: 운동선수 자세 분석을 위한 AI 구현법 (4) | 2025.07.01 |



