Visual SLAM과 라이다(LiDAR) 하이브리드 매핑 구현
서론: 공간 인식 기술의 진화
자율 주행차, 드론, 로봇 기술의 핵심은 ‘공간을 얼마나 정확하게 인식하고 이해하느냐’에 달려 있습니다. 이러한 기술 발전의 중심에는 **SLAM(Simultaneous Localization and Mapping, 동시적 위치추정 및 지도작성)**이 존재하며, 특히 Visual SLAM과 LiDAR 기반 매핑 기술이 주목받고 있습니다.
최근에는 이 두 기술을 결합한 하이브리드 SLAM이 등장하면서 더욱 정밀하고 실시간성이 뛰어난 공간 매핑이 가능해졌습니다. 본 글에서는 Visual SLAM과 LiDAR 각각의 원리를 소개하고, 이 둘을 결합한 하이브리드 매핑의 구현 방식과 활용 사례를 살펴보겠습니다.
Visual SLAM의 개념과 특징
1. Visual SLAM이란?
Visual SLAM은 카메라 영상만을 이용해 자신의 위치를 추정하고 주변 지도를 동시에 작성하는 기술입니다. 일반적으로 RGB 카메라, RGB-D 카메라, 스테레오 카메라 등이 활용되며, 연속적인 이미지 프레임 간의 변화를 분석하여 이동 경로와 주변 환경의 3D 구조를 추론합니다.
2. 장점과 한계
- 장점:
- 비용이 낮다 (일반 카메라 사용 가능)
- 텍스처가 풍부한 환경에서 매우 정확한 위치 추정 가능
- 드론이나 모바일 로봇에 적합
- 한계:
- 조명 변화, 어두운 환경, 텍스처가 부족한 곳에서는 성능 저하
- 절대 거리 측정에는 제약이 있음 (스케일 추정 불확실성)
LiDAR 기반 SLAM의 개요
1. LiDAR란 무엇인가?
LiDAR(Light Detection and Ranging)는 레이저를 발사해 물체에 반사된 시간을 계산하여 거리와 위치를 정밀하게 측정하는 기술입니다. 이 데이터를 통해 정밀한 3D 포인트 클라우드 지도를 생성할 수 있습니다.
2. LiDAR SLAM의 특징
- 고정밀 3D 공간 인식: 몇 센티미터 단위의 정확도
- 어두운 환경에서도 동작 가능
- 하지만 고가의 센서와 처리 비용이 높은 것이 단점
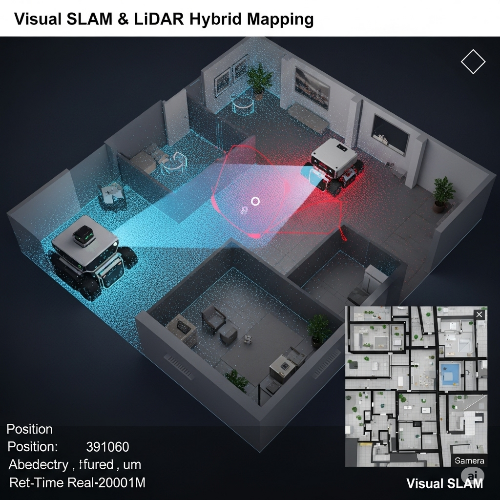
하이브리드 매핑: Visual SLAM + LiDAR의 융합
1. 왜 하이브리드가 필요한가?
Visual SLAM은 조도나 텍스처 변화에 취약하고, LiDAR는 구조적으로 고가이며 텍스처 인식이 불가능합니다. 이를 보완하기 위해 두 기술을 결합하면 각각의 약점을 상호 보완하면서도 정밀도와 신뢰도를 높일 수 있습니다.
2. 하이브리드 매핑의 구현 방식
- 동시 데이터 수집:
- 카메라와 LiDAR 센서를 동시에 구동하여 동일 시간대의 데이터를 수집합니다.
- 센서 퓨전:
- 각 센서의 위치 추정 결과를 Extended Kalman Filter, Graph Optimization, 또는 Deep Learning 기반 퓨전 네트워크로 통합합니다.
- 맵 정렬 및 재구성:
- Visual SLAM이 제공하는 텍스처 정보를 LiDAR의 정밀한 지형 정보에 맵핑하여 보다 현실감 있는 3D 지도 생성
적용 사례 및 실무 응용
1. 자율 주행차
대표적인 응용 분야는 자율 주행입니다. Tesla를 제외한 대부분의 기업은 LiDAR를 포함한 하이브리드 센서 전략을 채택하고 있으며, Visual SLAM은 카메라 기반 인지 시스템에서 핵심 역할을 합니다.
2. 실내 내비게이션
GPS가 작동하지 않는 실내 환경에서는 Visual SLAM과 LiDAR 결합을 통해 로봇이 자체적으로 환경을 파악하고 경로를 생성할 수 있습니다. 예: 물류창고, 병원, 호텔 안내로봇
3. 드론 기반 정밀 측량
드론에 Visual SLAM과 경량 LiDAR를 탑재하면 지형 지물의 고해상도 3D 매핑이 가능하여, 건설 현장 점검, 농업 분석, 재난 대응 등에 효과적입니다.
기술적 과제와 미래 전망
1. 실시간성 향상
센서가 증가하면서 연산량이 급증하기 때문에, 하이브리드 시스템의 실시간 데이터 처리 성능을 높이기 위한 경량화와 병렬 처리 기술이 필요합니다.
2. AI 기반 퓨전
딥러닝을 활용한 데이터 퓨전 기법이 점점 정교해지면서, 복잡한 환경에서도 더욱 정확한 위치 추정과 맵핑이 가능해질 것으로 기대됩니다.
3. Edge Computing과의 결합
현장에서 실시간 분석을 가능하게 하는 엣지 컴퓨팅 기술과 결합하여 네트워크 지연 없이 고속 추론이 가능한 Visual SLAM + LiDAR 시스템 개발이 진행 중입니다.
결론: 차세대 공간 인식의 핵심 기술
Visual SLAM과 LiDAR 기반 매핑 기술은 각각의 한계를 극복하기 위해 하이브리드 형태로 진화하고 있으며, 이는 자율주행, 로봇공학, 정밀지도 작성 등 수많은 분야에서 핵심적인 역할을 하게 될 것입니다. 특히 실시간성, 정확성, 신뢰성을 동시에 요구하는 응용 분야에서 하이브리드 매핑은 향후 공간 인식 기술의 표준이 될 것으로 보입니다.